Синхронный реактивный двигатель
Содержание:
Способы пуска
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.

Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.

Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
Частотный пуск
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.

Разновидности агрегатов
Синхронный генератор (мотор) подразделяется на несколько моделей, которые предназначены для разнообразных целей:
- Шаговые (импульсные) – применяются для приводов механизмов с циклом работы старт-стоп или устройств непрерывного движения с импульсным управляющим сигналом (счетчиков, лентопротяжных устройств, приводов станков с ЧПУ и др.).
- Безредукторные – для применения в автономных системах.
- Бесконтактные – применяются для работы в качестве электростанций на судах морского и речного флота.
- Гистерезисные – используются для счетчиков времени, в инерционных электроприводах, в системах автоматического управления;
- Индукторные моторы – для снабжения электроустановок.
Асинхронный запуск
Наиболее распространенным способом пуска является метод с использованием пусковых короткозамкнутых (демпферных) электроповодников, расположенных в пазах полюсных элементов. Электрообмотки выполнены в виде латунных или металлических стержней, которые с двух сторон замыкают медными кольцами (на рисунке позиция «б»).
При пуске обмотку возбуждения (ОВ) замыкают на резистор, а цепь статора подключают к сети электропитания (поз. «а»). Вращающееся поле статорного устройства индуцирует в стержнях ЭДС, вследствие чего в них возникают токи. При их взаимодействии с магнитным потоком статора на каждый стержень действует электромагнитная сила Fэм, вызывающая вращение.
После достижения предсинхронной скорости, ОВ подключается к источнику постоянного питания. Образующийся момент разгоняет ротор электродвигателя до синхронизма. В это время в пусковой цепи больше не наводится ЭДС, поэтому асинхронный момент равен нулю. Затем демпферная КЗ-электрообмотка осуществляет лишь успокоительную функцию, ограничивая возможные колебания вала.
Процесс пуска синхронного двигателя должен производиться при замкнутой ОВ на активное электросопротивление, величина которого должна быть ориентировочно в десятикратном размере больше электросопротивления возбуждающей электроцепи. При этом замыкание ОВ накоротко в период разгона нежелательно, поскольку на роторе формируется замкнутый контур, создающий асинхронный момент. При половинной предсинхронной скорости, момент превращается в тормозящий и происходит определенное торможение синхронного двигателя. Имеет место, так называемый, «провал» в моментной величине, значительно снижающий пусковые качества СД.
Существуют и другие ограничения и особенности пуска с использованием КЗ-обмоток. Это связано с возникновением на старте большого пускового тока. В связи с этим СД подключаются к сети переменного тока только при ее соответствующей мощности, выдерживающей пяти- и семикратные превышения токовых нагрузок относительно номинальных значений эл/мотора. При недостаточной мощности электросети для ограничения скачков тока включение в работу осуществляется с помощью пониженного напряжения. Такие способы пуска носят название автотрансформаторный или реакторный пуск.
Реакторы и автотрансформаторы обеспечивают принудительное снижение быстроты нарастания тока и его величины в рабочих обмотках. Реакторный пуск предусматривает установку реакторов в каждую цепь питания фазной электроцепи СД. В связи с этим токовые значения не вырастают скачкообразно и включение получается более плавным, чем прямой пуск. При разгоне электрооборудования до предсинхронных оборотов выключатель К1 выводит индуктивный компонент из электроцепи и эл/привод работает в штатном режиме.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
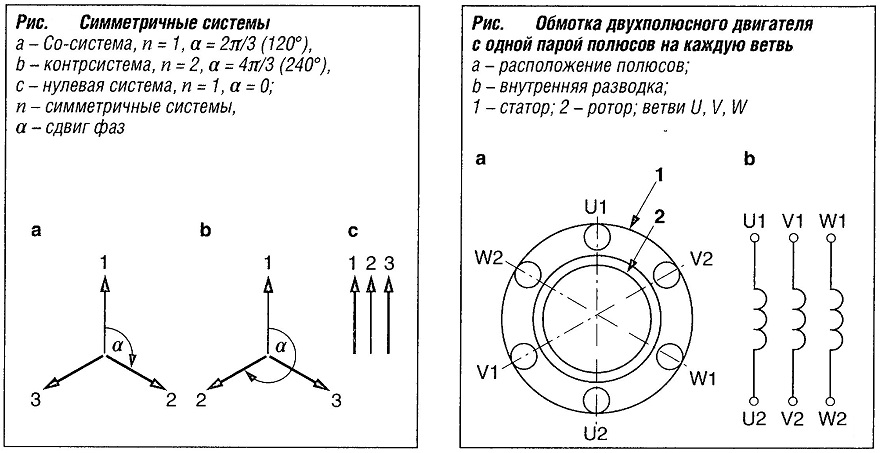
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
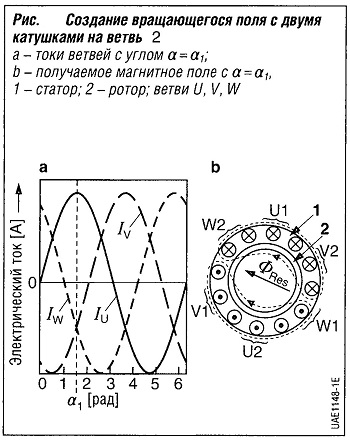
Создание вращающегося поля
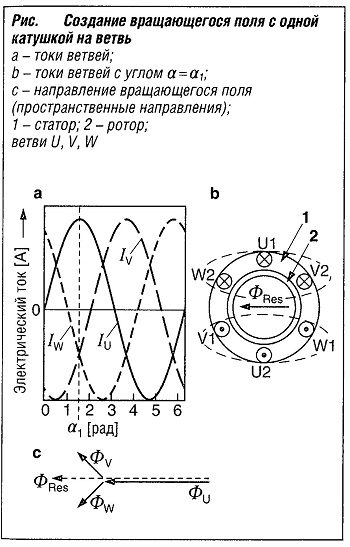 Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
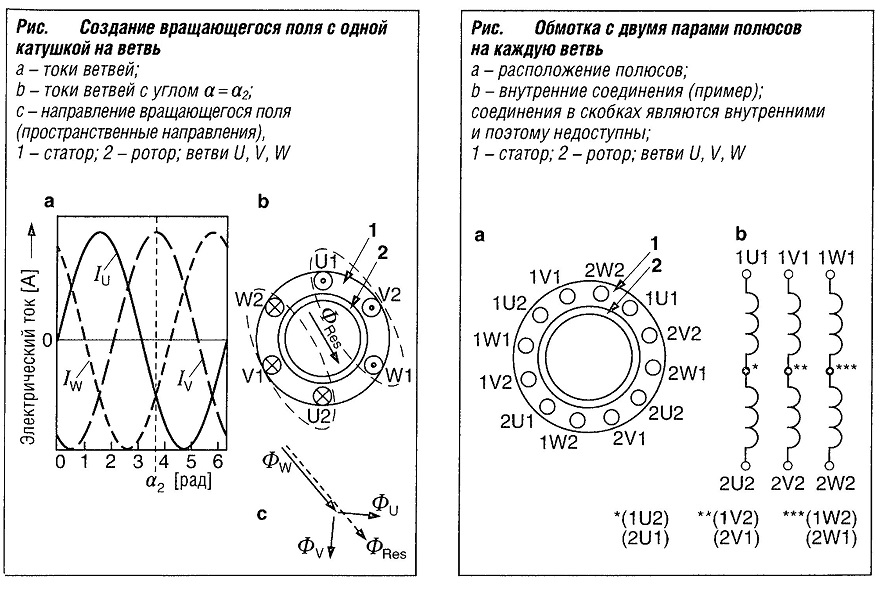
 При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
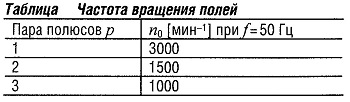
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
 как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Советуем изучить — Подключение датчиков температуры
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле. До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ ). Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителяr 1 и подвозбудителяr 2 . В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В
(рис. 1.3, б). Трехфазная обмотка2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения1 возбудителя В осуществляется от подвозбудителяПВ – генератора постоянного тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий трансформатор и выпрямительный полупроводниковый преобразователь ПП
преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ
) с выпрямительным трансформатором (ВТ ) и тиристорным преобразователем (ТП ), через которые электроэнергия переменного тока из цепи статораСГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбужденияАРВ , на вход которого поступают сигналы напряжения на входеСГ (через трансформатор напряженияТН ) и тока нагрузкиСГ (от трансформатора токаТТ ). Схема содержит блок защиты (БЗ ), обеспечивающий защиту обмотки возбуждения (ОВ ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности). В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы
составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Конструкция синхронного устройства
Принцип работы и устройство синхронных машин остаются понятными даже для неопытных потребителей. К ключевым составляющим системы относят следующие узлы:
- Статор — представляет собой неподвижную часть установки, на которой расположено три обмотки. Они соединены по схеме «звезда» или «треугольник». В качестве материала для изготовления статора используются пластины из суперпрочной электротехнической стали.
- Ротор — подвижный элемент двигателя, оснащенный обмоткой. Во время работы установки эта обмотка пропускает определенное напряжение.
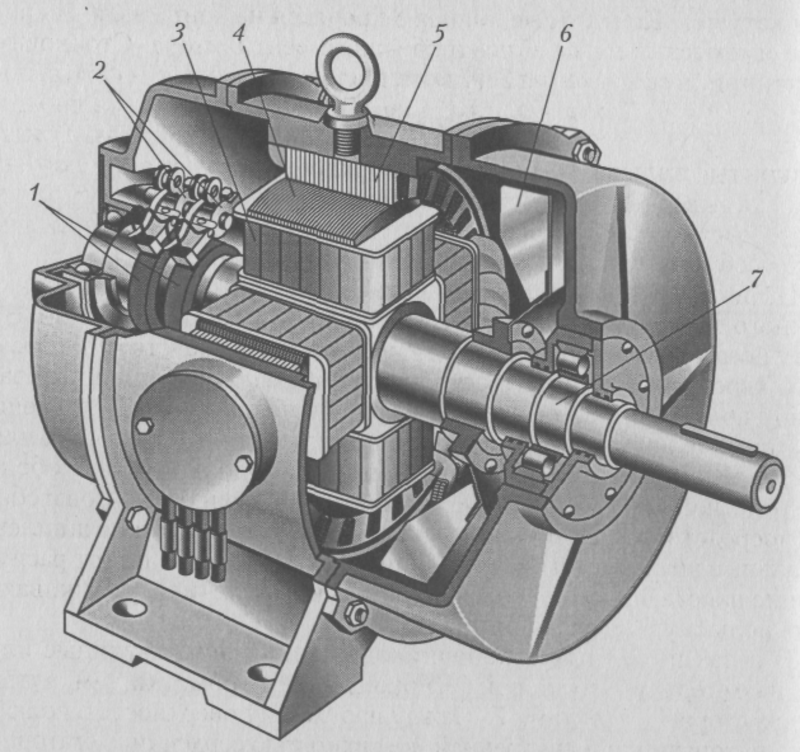
Между зафиксированной и подвижной частью системы находится небольшая воздушная прослойка, гарантирующая сбалансированную работу мотора и беспрепятственное воздействие магнитного поля на ключевые составляющие агрегата. Также в двигателе установлены подшипники, необходимые для вращения ротора, и клеммная коробка. Последняя находится в верхней части механизма.
Область применения
Применяют синхронные агрегаты как источники электроэнергии переменного тока: используют на мощных тепло-, гидро- и атомных станциях, на передвижных электрических станциях, транспортных системах (машинах, самолетах, тепловозах).
Синхронный агрегат способен работать автономно – генератором, который питает подключаемую к ней какую-либо нагрузку, либо параллельно с сетью — в нее подключены иные генераторы.
Синхронный агрегат может включать устройства в тех местах, где нет центрального питания электрических сетей. Данные приборы можно применять в фермерских хозяйствах, которые расположены далеко от населенных пунктов.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».

Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.

Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.