Бесколлекторный двигатель
Содержание:
- Применение и устройство коллекторных электродвигателей
- Устройство бесколлекторной модели
- Обозначения бесколлекторных моторов[править]
- Управление двигателем
- Принцип работы
- Достоинства и недостатки
- Бесколлекторный двигатель.
- Использование регуляторов АВТ6
- Варианты конструкции двигателя
- Как работает бесщеточный двигатель
- Управление 3-фазными двигателями BLDC
Применение и устройство коллекторных электродвигателей
Коллекторный электродвигатель по своему устройству принципиально не отличается от двухполюсного двигателя постоянного тока последовательного возбуждения. К отличительным особенностям коллекторных двигателей относятся: высокая скорость вращения якоря, малые габаритные размеры и масса. Используются в пылесосах, кухонных машинах, ручных электроинструментах. Для указанных машин, как правило, применяются универсальные (встраиваемые) коллекторные электродвигатели. Универсальными принято называть коллекторные двигатели, которые работают как от переменного, так и постоянного тока.
Коллекторный электродвигатель переменного тока конструктивно сложнее двигателя постоянного тока. Эти усложнения связаны с необходимостью набора сердечника индуктора из отдельных листов, а также закладывания дополнительной обмотки, компенсирующей явления, связанные с искрением под щетками. Нельзя не отметить и такие недостатки этих машин, как высокий уровень шума, помехи радиоприему, стирание угольных щеток. Вместе с тем по некоторым параметрам они превосходят асинхронные двигатели. К ним можно отнести: большое значение максимальной скорости вращения (до 25 000 об/мин), возможность ее плавной регулировки, наличие хороших пусковых данных.
Для того чтобы понять, как работает коллекторный электродвигатель, его принцип работы можно проиллюстрировать на следующем простом опыте (рис. 1). Если пустить ток по рамке прямоугольной формы, помещенной между полюсами магнита (постоянного или электромагнита), она начинает вращаться. С помощью контактов-полуколец обеспечивается переключение тока в рамке, благодаря чему осуществляется ее непрерывное вращение в одном направлении. Коллекторные двигатели содержат много таких рамок, и соответствующее количество пар контактов. Таким образом, работа двигателей данного вида обеспечивается за счет взаимодействия магнитных полей, присутствующих в статоре и якоре.
На рис. 2 показана схема, поясняющая подключение коллекторных электродвигателей. Вся силовая нагрузка выполняется симистором, подающим напряжение на двигатель и подключенный к нему последовательно.
Электродвигатели коллекторные однофазные имею высокую удельную мощность. Ими довольно широко и успешно оснащают бытовую технику и ручной электроинструмент. Коллекторные однофазные электродвигатели установлены на подавляющей части бытовых электроприборов. Подключение к сети постоянного тока осуществляется с помощью всей обмотки возбуждения. Для подключения к переменной сети используется лишь часть ее. Это освобождает от необходимости включения компенсационных обмоток.
Оригинал статьи размещен на нашем сайте cable.ru
Если этот материал был для Вас полезным, поделитесь
А для того, чтобы не пропустить выход новых статей, ставьте «лайк»
Источник
Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.

Обозначения бесколлекторных моторов[править]
бессколлекторных моторов
Часто обозначение бесколлекторного мотора тесно связано с его геометрическими и электрическими параметрами.
Рассмотрим обозначение на примере мотора: Tower Pro 2408-21T
- первые две цифры (24) — обозначают диаметр статора (иногда ротора) в мм
- вторые две цифры (08) — обозначают длину каждого магнита в моторе в мм
- далее может следовать одна или две цифры (21) — это количество витков на каждом зубе статора
- еще бывает в конце буква T (или символ Δ) — обозначающий намотку типа «дельта» («треугольник») ИЛИ буква Y (или символ *) — говорящий о намотке типа «звезда».
При большем диаметре ротора (статора) получается больший крутящий момент, при прочих равных условиях. Длина магнитов, также как и диаметр ротора, влияет на крутящий момент мотора.
С витками работает соотношение: «меньше витки — больше обороты». Если необходимо поставить небольшой винт и получить высокие обороты, то необходимо выбирать мотор с небольшим количеством витков. Если задача крутить большой винт на небольших оборотах (Slow Flyer) — следует выбирать мотор с большим количеством витков.
Управление двигателем
Контроллер бесколлекторного электродвигателя постоянного тока совершает регулирование действующего на ротор момента, меняя величину широтно-импульсной модуляции. Коммутация при этом контролируется и осуществляется посредством электроники, в отличие от обычного щёточного двигателя постоянного тока. Также распространёнными являются системы управления, которые для рабочего процесса реализуют алгоритмы широтно-импульсной модуляции и широтно-импульсного регулирования.
 Двигатели на векторном управлении обеспечивают самый широкий из всех известных диапазонов для регулирования собственной скорости. Регулирование этой скорости, как и поддержание потокосцепления на необходимом уровне, происходит благодаря преобразователю частоты.
Двигатели на векторном управлении обеспечивают самый широкий из всех известных диапазонов для регулирования собственной скорости. Регулирование этой скорости, как и поддержание потокосцепления на необходимом уровне, происходит благодаря преобразователю частоты.
Особенностью регулирования электропривода, основанного на векторном управлении, является наличие контролируемых координат. Они находятся в неподвижной системе и преобразуются во вращающуюся, выделяя пропорциональное контролируемым параметрам вектора постоянное значение, благодаря чему формируется управляющее воздействие, а затем обратный переход.
Несмотря на все преимущества такой системы, она сопровождается и недостатком в виде сложности управления устройством для регулирования скорости в широком диапазоне.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
Коммутацию следует производить таким образом, чтобы Ф0 (поток возбуждения ротора) поддерживался относительно потока якоря постоянным. При взаимодействии такого возбуждения и потока якоря формируется вращающий момент М, стремящийся развернуть ротор и параллельно обеспечить совпадение возбуждения и потока якоря. Однако во время поворота ротора происходит переключение различных обмоток под воздействием датчика положения ротора, в результате чего поток якоря разворачивается по направлению к следующему шагу.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд;
- высокое быстродействие;
- возможность изменения частоты вращения;
- отсутствие искрящих щеток;
- малые шумы, как в звуковом, так и высокочастотном диапазонах;
- надежность;
- способность противостоять перегрузкам по моменту;
- отличное соотношение габаритов и мощности.
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников.
Недостатками БДПТ является сложность системы управления и высокая стоимость.
Бесколлекторный двигатель.
Бесколлекторный двигатель – это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
Описание:
Бесколлекторный двигатель— это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел заменен полупроводниковым коммутатором, управляемым датчиком положения ротора.
Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель.
Бесколлекторный двигатель – это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока.
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. В коллекторном двигателе наоборот, обмотки находятся на роторе.
Преимущества:
— широкий диапазон изменения частоты вращения,
— безконтактность и отсутствие узлов, требующих частого обслуживания (коллектора),
— возможность использования во взрывоопасной и агрессивной среде,
— большая перегрузочная способность по моменту,
— высокие энергетические показатели (КПД выше 90 %),
— быстрый набор максимальной скорости вращения,
— большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов,
— низкий перегрев электродвигателя при работе в режимах с возможными перегрузками,
— существенно более низкий уровень электромагнитных шумов по сравнению с коллекторными моторами.
Недостатки:
— высокая стоимость (с учетом цены драйвера),
— невозможность использования бесколлекторного электродвигателя без драйвера даже для краткосрочного включения (например, чтобы проверить работоспособность),
— сложная структура двигателя и управление им,
— проблемный ремонт.
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями:
— меньше шума,
— нет выхлопа,
— хорошая приемистость,
— малая масса,
— не требуется прогрев и не надо бороться с перегревом,
— в несколько раз больший срок службы,
— не нужно частое обслуживание, инспекции и смена масла и технических жидкостей.
Применение:
— бытовая и медицинская техника,
— авиамоделирование и авиастроение,
— трубозапорные приводы газо- и нефтепроводов,
— робототехника,
— судостроение,
— станки с ЧПУ,
— в компьютерном приводе,
и т.д.
Примечание: Фото https://www.pexels.com
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.

Варианты конструкции двигателя
|
|
|
|



Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Как работает бесщеточный двигатель
В 1970-х годах произошел скачок в сфере полупроводниковой электроники, благодаря которому было решено устранить коллектор и щетки в двигателях постоянного тока. В бесщеточном двигателе усилитель заменил собой механические соединения контактов. Электронный датчик понимает угол поворота ротора и способен контролировать полупроводниковые переключатели. Отказ от скользящих контактов привел к снижению трения в механизме, а значит, и увеличению срока службы.
Бесщеточный двигатель в шуруповерте гораздо эффективнее и меньше страдает от износа. Также он гораздо тише и обеспечивает высокий крутящий момент. Внутренние элементы полностью закрываются, благодаря чему грязь и вода не попадают внутрь. Эффективность преобразования энергии в силу позволяет получить высокий КПД.
На скорость вращение влияет не центробежная сила, а напряжение, потому двигатель может работать в заданном режиме без перебоев. Если ток начнет просачиваться или мотор намагнитится – производительность не пострадает, а скорость не отстанет от момента вращения.
При эксплуатации механизма нет нужны в использовании коммутатора и обмотки, а магнит гораздо меньше, как по массе, так и по габаритам, если сравнивать с щеточным конкурентом.
Такое решение применяется в шуруповертах, мощность которых не переходит за 5 кВт. Их неразумно устанавливать в моделях с большими параметрами. Магниты внутри корпуса чувствительны к магнитному полю и сильному нагреву.
Разница щеточного и бесщеточного шуруповерта в принципе работы двигателя:
- Ток переключается не в роторе, а в обмотках статора. На якоре не достает катушки, магнитное поле образуется благодаря специальным магнитам внутри корпуса.
- Миг, когда требуется подача электричества, определяется встроенными датчиками. Они работают по принципу эффекта Холла. ДПР импульсы и регуляторные сигналы скорости проходят через встроенный процессор, где и формируются. Это называется ШИМ сигналом.
- Образованные импульсы в порядке друг за другом направляются на инверторы или, если проще, усилители – они увеличивают полученный ток. Их выходы связаны с обмоткой на статоре. Инверторы необходимы для коммутирования тока, возникающего в катушках, следуя импульсам, которые подаются из узла внутреннего процессора.
В результате описанного процесса формируется магнитное поле, которое связывается с тем, что вокруг ротора. Якорь начинает вращение – инструмент работает.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
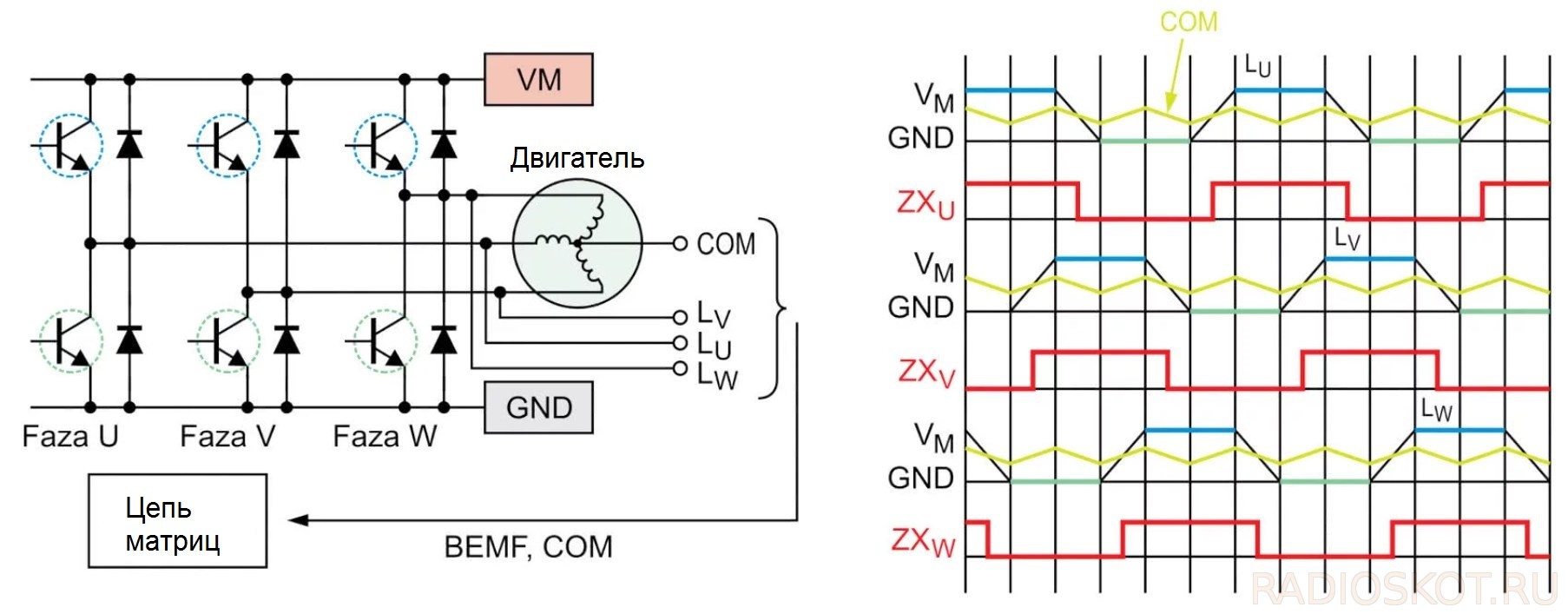
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Форум по обсуждению материала БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
|
|
||
|
|