Controller area network
Содержание:
- Поддержка разработчиков
- How to decode raw CAN data to ‘physical values’
- Bit timing
- Применение CAN
- Кадры сообщений CAN
- API
- Description
- Можно ли сделать анализатор своими руками?
- Инструкция по подключению сигнализации по CAN-шине
- Разновидности CAN
- Элементная база для CAN
- Возможно, вам также будет интересно
- Как работает CAN шина
- Что такое CAN-шина
- Сетевая гибкость и лёгкость расширения
Поддержка разработчиков
На сайте компании Microchip можно ознакомиться с примерами применения CAN-устройств для разных задач. Все примеры сопровождаются подробным описанием и текстами программ на языках С или ассемблера. В примере AN877 описан пример реализации протокола DeviceNet, а в AN878 — подпрограммы на языке С для работы с модулем ECAN. Особый интерес представляет пример реализации бутлоадера (обновления программного обеспечения микроконтроллерных узлов) через CAN-сеть (AN247). С помощью простой программы загрузчика, находящейся в памяти контроллера, входящего в сеть, можно удаленно обновить его программное обеспечение. Этот пример будет полезен разработчикам автомобильной и промышленной электроники, доступ к которой во время эксплуатации ограничен или затруднен.
Набор разработчика для построения систем с CAN-интерфейсом (DV251001) поможет разработчику в сжатые сроки не только овладеть навыками построения CAN-интерфейса, но и создать и запрограммировать свою собственную сеть. Благодаря низкой стоимости создания демонстрационного макета и демонстрации основных возможностей CAN-интерфейса комплект идеально подходит для разработчиков автомобильной, промышленной и измерительной техники. На плате размещены сокеты для PIC-контроллеров, специальный разъем для контроля за всеми выводами MCP2510 и место для монтажа собственных компонентов. Также установлены приемопередатчики с возможностью настойки при помощи перемычек на различные конфигурации шины, а использование дополнительного разъема наплате для подключения к PC позволит наблюдать трафик CAN-сообщений на экране компьютера. Передаваемые сообщения формируются с помощью простого в использовании Windows-интерфейса. На плате к выводам приемника и передатчика подключены светодиоды, демонстрирующие интенсивность трафика. Есть возможность задавать как цифровые, так и аналоговые сигналы, передавать их от одного узла CAN к другому, а затем и в персональный компьютер, где они отображаются в дешифрированном формате для упрощения понимания контекста сообщений.
Набор разработчика для построения CAN-узлов на базе расширителей MCP250XX (DV250501) предназначен для быстрого создания несложных CAN-узлов на базе микросхемрасширителей CAN семейства MCP250хх. Применение этих микросхем не требует дополнительного микроконтроллера. Имеется возможность работы как с цифровыми, так ианалоговыми сигналами, управление встроенным ШИМ. Основные достоинства комплекта:
- демонстрация и быстрая разработка систем на базе расширителей MCP250XX;
- программирование MCP250хх с помощью входящего в комплект программатора и программного обеспечения;
- внутрисхемное программирование MCP250хх;
- возможность работы с внешней CAN-шиной.
Комплект поставки включает плату, источник питания, образцы микросхем MCP250хх, LPT-кабель для связи с компьютером, а также всю необходимую документацию и программное обеспечение.
How to decode raw CAN data to ‘physical values’
If you review the raw CAN bus data sample above, you will probably notice something:
Raw CAN bus data is not human-readable.
To interpret it, you need to decode the CAN frames into scaled engineering values aka physical values (km/h, degC, …).
Below we show step-by-step how this works:
Extracting CAN signals from raw CAN frames
Each CAN frame on the bus contains a number of CAN signals (parameters) within the CAN databytes. For example, a CAN frame with a specific CAN ID may carry data for e.g. 2 CAN signals.
To extract the physical value of a CAN signal, the following information is required:
- Bit start: Which bit the signal starts at
- Bit length: The length of the signal in bits
- Offset: Value to offset the signal value by
- Scale: Value to multiply the signal value by
To extract a CAN signal, you ‘carve out’ the relevant bits, take the decimal value and perform a linear scaling:
physical_value = offset + scale * raw_value_decimal
The challenge of proprietary CAN data
Most often, the CAN bus «decoding rules» are proprietary and not easily available (except to the OEM, i.e. Original Equipment Manufacturer). There are a number of solutions to this when you’re not the OEM:
- Record J1939 data: If you’re logging raw data from heavy duty vehicles (trucks, tractors, …), you’re typically recording J1939 data. This is standardized across brands — and you can use our J1939 DBC file to decode data. See also our J1939 data logger intro
- Record OBD2/UDS data: If you need to log data from cars, you can typically request OBD2/UDS data, which is a standardized protocol across cars. For details see our OBD2 data logger intro and our free OBD2 DBC file
- Use public DBC files: For cars, online databases exist where others have reverse engineered proprietary some of the CAN data. We keep a list of such databases in our
- Reverse engineer data: You can also attempt to reverse engineer data yourself by using a CAN bus sniffer, though it can be time consuming and difficult
-
Use sensor modules: In some cases you may need sensor data that is not available on the CAN bus (or which is difficult to reverse engineer). Here, sensor-to-CAN modules like the series can be used. You can integrate such modules with your CAN bus, or use them as add-ons for
your CAN logger to add data such as GNSS/IMU or temperature data - Partner with the OEM: In some cases the OEM will provide decoding rules as part of the CAN bus system technical specs. In other cases you may be able to get the information through e.g. a partnership
CAN database files (DBC) — J1939 example
In some cases, conversion rules are standard across manufacturers — e.g. in the J1939 protocol for heavy-duty.
This means that you can use the J1939 parameter conversion rules on practically any heavy-duty vehicle to convert a large share of your data. To make this practical, you need a format for storing the conversion rules. Here, the CAN database (DBC) format is the industry standard — and is supported by most CAN
bus decoder software incl. the supporting tools for our CAN loggers, asammdf and CANvas.
We also offer a low cost J1939 DBC file, which you can purchase as a digital download. With this, you can get quickly from raw J1939 data to human-readable form.
Learn more
Example: Decoded CAN sample data (physical values)
To illustrate how you can extract CAN signals from raw CAN data frames, we include below the previous J1939 sample data — but now decoded via a J1939 DBC file using the asammdf GUI tool.
As evident, the result is timeseries data with parameters like oil temperature, engine speed, GPS, fuel rate and speed:
For more on logging J1939 data, see our J1939 data logger and mining telematics articles. You can also learn how to analyze/visualize your CAN data via the free asammdf GUI tool or telematics dashboards.
Bit timing
Each node in a CAN network has its own clock, and no clock is sent during data transmission. Synchronization is done by dividing each bit of the frame into a number of segments: Synchronization, Propagation, Phase 1 and Phase 2. The Length of each phase segment can be adjusted based on network and node conditions. The sample point falls between Phase Buffer Segment 1 and Phase Buffer Segment 2, which helps facilitate continuous synchronization. Continuous synchronization in turn enables the receiver to be able to properly read the messages.
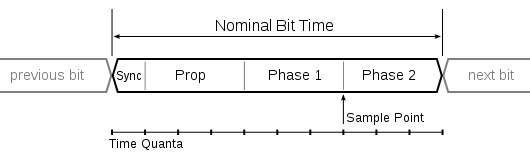
An example CAN Bit Timing with 10 time quanta per bit.
Применение CAN
В настоящее время CAN находит применение в различных областях.
Движущийся транспорт
- Пассажирские автобусы
- Трейлеры и грузовики
- Вагон платформы и тепловозы
- Легковые автомобили
- Планеры и самолеты
- Поезда, электрички и метро
- Морские суда и паромы
- Яхты и моторные лодки
- Сельхоз. машины (комбайны и др.)
- Экскаваторы
- Дорожные машины
- Лесные машины
- Экскаваторы
Промышленная автоматика
- ПЛК (PLC)
- Роботы и манипуляторы
- Серводвигатели
- Интеллектуальные сенсоры и механизмы
- Гидравлика
- Датчики расхода воды и электричества
- Текстильная промышленность
- Медицинские приборы
- Охранно пожарная сигнализация
- Лифты
- Стиральные машины
- Системы доступа и др.
Объекты с контурным управлением
- Системы кондиционирования воздуха(СКВ)
- Системы автоматического регулирования давления (САРД)
- Системы автоматического регулирования температуры (САРТ)
- Мониторинг работы турбин
- Управление паровыми котлами
- Симуляторы кабины пилота
Военные системы
- Крылатые ракеты и беспилотные планеры
- Истребители
- Военно морской флот
- Управление в танках
- Подводные лодки
- Самоходный транспорт
- Спутники и космические станции
Кадры сообщений CAN
Так как же на самом деле выглядит сообщение CAN? В первоначальном стандарте ISO изложено то, что называется стандартом CAN. Стандарт CAN использует 11-битный идентификатор для разных сообщений, что в сумме составляет 211, т. е. 2048, разных идентификаторов сообщений. CAN был позже изменен; идентификатор был расширен до 29 бит, что дало 229 идентификаторов. Это называется расширенной шиной CAN. CAN использует мультимастерную шину, где все сообщения транслируются по всей сети. Идентификаторы обеспечивают приоритет сообщения для арбитража.
CAN использует дифференциальный сигнал с двумя логическими состояниями, называемыми рецессивным и доминантным. Рецессивный указывает, что дифференциальное напряжение меньше минимального порогового напряжения. Доминантный указывает, что дифференциальное напряжение больше, чем этот минимальный порог. Интересно, что доминантное состояние достигается путем передачи логического уровня «0» на шину, в то время как рецессивное состояние достигается с помощью логического уровня «1». Это инверсия от традиционных высоких и низких логических значений, используемых в большинстве систем. Эти два состояния будут подробно описаны далее
Важно то, что доминантное состояние приоритетнее рецессивного в арбитраже
API
Скорость передачи данных
Для того, чтобы задать, с какой скоростью будет инициализирована шина CAN, воспользуйтесь одним из вариантов ниже:
1 #define CAN_5KBPS 1 2 #define CAN_10KBPS 2 3 #define CAN_20KBPS 3 4 #define CAN_25KBPS 4 5 #define CAN_31K25BPS 5 6 #define CAN_33KBPS 6 7 #define CAN_40KBPS 7 8 #define CAN_50KBPS 8 9 #define CAN_80KBPS 9 10 #define CAN_83K3BPS 10 11 #define CAN_95KBPS 11 12 #define CAN_100KBPS 12 13 #define CAN_125KBPS 13 14 #define CAN_200KBPS 14 15 #define CAN_250KBPS 15 16 #define CAN_500KBPS 16 17 #define CAN_666kbps 17 18 #define CAN_1000KBPS 18
Приемные маски и фильтры
Чип-контроллер оснащен 2 регистрами приемных масок и 5 регистрами приемных фильтров – они обеспечивают получение данных от целевого устройства. Они особенно полезны при использовании в сетях, состоящих из большого количества узлов.
Для использования этих регистров в библиотеке «CAN_BUS_Shield» есть две функции.
Для маски:
init_Mask(unsigned char num, unsigned char ext, unsigned char ulData);
Для фильтра:
init_Filt(unsigned char num, unsigned char ext, unsigned char ulData);
Аргументы значат следующее:
- num – какой регистр использовать. Для регистра маски доступны значения «0» и «1», а для регистра фильтра – от «0» до «5»
- ext – статус кадра. Значение «0» будет означать, что это маска или фильтр для стандартного кадра, а «1» – для расширенного кадра.
- ulData – содержание маски или фильтра
Проверка получения данных
Чип MCP2515 может либо использовать дополнительные контакты, чтобы сообщить о том, что передача или получение кадра прошли успешно, либо работать в режиме опроса, в котором ПО проверяет, не пришел ли какой-нибудь кадр.
Для режима опроса воспользуйтесь следующей функцией:
INT8U MCP_CAN::checkReceive(void);
Если кадр получен, функция вернет «1», а если ничего не пришло, то «0».
Считывание CAN-идентификатора
Получив данные, вы можете прочесть CAN-идентификатор «отправляющего» узла. Для этого воспользуйтесь следующей функцией:
INT32U MCP_CAN::getCanId(void)
Отправка данных
Чтобы отправить данные на шину CAN, воспользуйтесь следующей функцией:
CAN.sendMsgBuf(INT8U id, INT8U ext, INT8U len, data_buf);
Ее аргументы означают следующее:
- id – откуда пришли данные
- ext – статус кадра. Значение «0» – для стандартного кадра, «1» – для расширенного кадра
- len – размер кадра
- data_buf – содержимое сообщения
К примеру, в скетче-примере «send» эта функция выглядит следующим образом:
unsigned char stmp8 = {, 1, 2, 3, 4, 5, 6, 7};
CAN.sendMsgBuf(0x00, , 8, stmp);
Считывание данных
Эта функция используется для получения данных «принимающим» узлом:
CAN.readMsgBuf(unsigned char len, unsigned char buf);
Получение данных осуществляется в условиях, заданных в масках и фильтрах. Другими словами, эта функция считывает только те кадры, что соответствуют требованиям масок и фильтров.
- len – размер данных
- buf – куда будут сохранены данные
Description
Driver API for CAN Bus Peripheral (Driver_CAN.h)
The Controller Area Network Interface Bus (CAN) implements a multi-master serial bus for connecting microcontrollers and devices, also known as nodes, to communicate with each other in applications without a host computer. CAN is a message-based protocol, designed originally for automotive applications, but meanwhile used also in many other surroundings. The complexity of the node can range from a simple I/O device up to an embedded computer with a CAN interface and sophisticated software. The node may also be a gateway allowing a standard computer to communicate over a USB or Ethernet port to the devices on a CAN network. Devices are connected to the bus through a host processor, a CAN controller, and a CAN transceiver.
The CAN Driver API allows to implement CAN Interfaces that conform to the CAN specifications available from BOSCH:
- CAN 2.0B: CAN Specification 2.0B (released Sep. 1991) which is now superseded by ISO 11898-1.
- CAN FD: CAN with Flexible Data Rate introduced in 2012 (released April 17th, 2012).
Wikipedia offers more information about the CAN Bus.
CAN 2.0B** Every CAN CMSIS-Driver supports the CAN 2.0B standard
CAN 2.0B supports:
- message can contain up to 8 data bytes
- bitrates of up to 1Mbits/s
- requests
CAN FD
Support for CAN FD depends on the hardware. A CMSIS-Driver that supports CAN FD has the capability data field fd_mode = 1, which can be retrieved with the function .
CAN FD supports:
- message can contain up to 64 data bytes
- faster data transfers with faster bitrate used during the data phase
CAN FD does not support requests.
Block Diagram
The CAN Driver API defines a CAN interface for middleware components. The CAN Driver supports multiple nodes, which are able to send and receive messages, but not simultaneously.

CAN Node Schematic
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства
Плата, использующаяся в качестве основы
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 4). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.

Рис. 4. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 5). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.

Рис. 5. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Элементная база для CAN
На самом нижнем уровне CAN-шины находится собственно двухпроводная линия с терминальными резисторами. Далее для повышения помехоустойчивости расположен дифференциальный приемопередатчик — трансивер. На следующем уровне — контроллер со встроенным модулем или автономный модуль CAN, подключаемый к главному контроллеру через параллельный или последовательный порт. Связь с узлами CAN, осуществляющими обмен информацией, ведется через линии портов микроконтроллеров. CAN-контроллеры осуществляют процедуру приема-передачи данных и соединяются с шиной двумя сигналами: RxD для приема с шины и TxD для передачи на шину. Реализация CAN-шины с помощью микроконтроллеров Infineon представлена на рис. 6.

Рис. 6. Реализация CAN-шины с помощью микроконтроллеров Infineon
Возможно, вам также будет интересно
В наше время вряд ли найдется инженерэлектронщик, не слышавший о шинах CAN и LIN. Эти интерфейсы уже завоевали прочные позиции во многих областях производства. И с большой долей уверенности можно сказать, что и в дальнейшем количество применений CAN и LIN будет только расти. Напомним кратко об этих шинах и их основных отличиях. CAN Основные характеристики
Тенденции по снижению себестоимости электронной техники в последнее десятилетие привели к сокращению объемов применения сигнальных и силовых трансформаторов. На смену им во многих случаях пришли импульсные источники питания и интегральные микросхемы гальванических развязок. Однако полноценной (или какой%либо вообще) замены классическим трансформаторам в целом ряде применений не существует, о чем свидетельствует присутствие на рынке многих производителей
Работа современных электронных устройств зачастую определяется не только параметрами процессора, но и скоростью обмена данными внутри самого устройства.
Как работает CAN шина
Фактически, шина представляет собой компактное устройство со множеством входов для подключения кабелей или разъём, к которому подсоединяются кабели. Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч. Серия сообщения отправляется на все устройства, но благодаря индивидуальным идентификаторам они обрабатывают только те, которые предназначаются именно для них. Идентификаторы CAN-шины могут иметь длину от 11 до 29 бит.
В зависимости от назначения КАН шины разделяются на несколько категорий:
- Силовые. Они предназначены для синхронизации и обмена данными между электронным блоком двигателя и антиблокировочной системой, коробкой передач, зажиганием, другими рабочими узлами автомобиля.
- Комфорт. Эти шины обеспечивают совместную работу цифровых интерфейсов, которые не связаны с ходовыми блоками машины, а отвечают за комфорт. Это система подогрева сидений, климат-контроль, регулировка зеркал и т.п.
- Информационно-командные. Эти модели разработаны для оперативного обмена информацией между узлами, отвечающими за обслуживание авто. Например, навигационной системой, смартфоном и ЭБУ.
Что такое CAN-шина
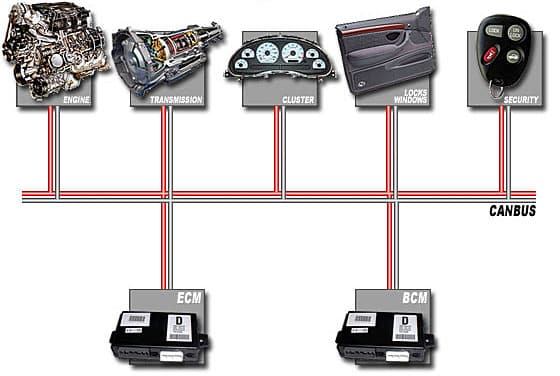
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Сетевая гибкость и лёгкость расширения
Принятая в CAN-сети схема передачи сообщений обеспечивает большие возможности при создании, расширении и модернизации систем.
Новые устройства, предназначенные для приёма данных, могут добавляться к сети без изменения уже существующих программных средств, если их подключение не приводит к превышению нагрузочной способности и максимальной длины шины. При этом новые сетевые устройства способны обмениваться информацией между собой, не нарушая работоспособность старой системы, если в протоколе обмена были использованы новые идентификаторы.
В CAN-сети имеется возможность одновременной передачи сообщений сразу нескольким устройствам. Эта особенность позволяет передавать по ней синхросигналы.